SLAM ( Simultaneous Localization and Mapping ) 기술의 개요
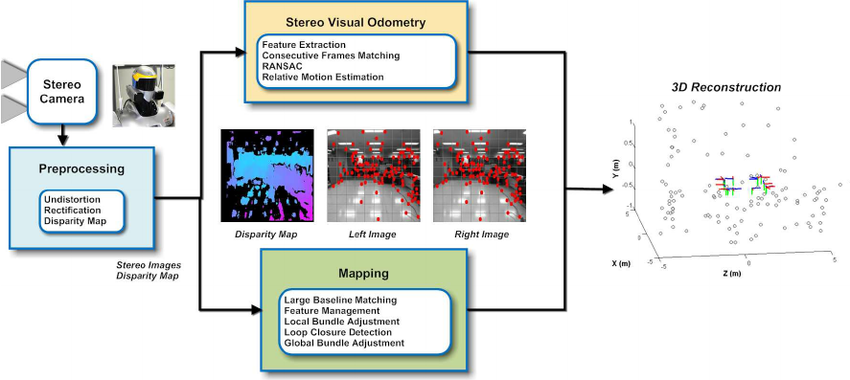
SLAM은 Simultaneous Localization and Mapping의 줄임말 입니다. 직역하면 “동시적 위치추정 및 지도 작성” 입니다. SLAM은 로봇이 3차원 공간상의 자신의 위치를 인식(Localization)하고, 동시에(Simultaneously) 공간의 3차원 지도도 만듭니다. 이를 매핑(Mapping)한다라고 표현합니다. SLAM 기술은 카메라를 이용하여 비전 SLAM, 스테레오 비전 SLAM, 레이저 라이다 SLAM, 자이로 라이다 SLAM등이 사용됩니다. 로봇시스템에 공간상의 위치인식은 대단히 어려운 분야였으며, 고성능의 컴퓨터 자원이 필요한 분야입니다. 수십년동안 연구의 결과, 최적의 알고리즘을 발전시켰고, 컴퓨팅 속도가 많이 향샹되어 요즘은 많은 분야에서 SLAM 시스템을 채용하고 있습니다.